Funktionelle Prüfungen in der Agrartechnik

Die Messrobotic, mit der Simulation RobSimulation erhält Einzug in die Agrartechnik.
Im Agrartechnik-Sektor generiert die Kombination aus hochpräziser Messtechnologie mit vorheriger Simulation des Prüfszenarios deutliche Zeit- und Kostenvorteile.
Bei der funktionellen Absicherung von Landmaschinen stellen die Größe und das Gewicht der Maschinen eine besondere Herausforderung dar. So stellen sich beispielsweise die Fragen:
Können alle Prüfpunkte durch den Roboter erreicht werden?
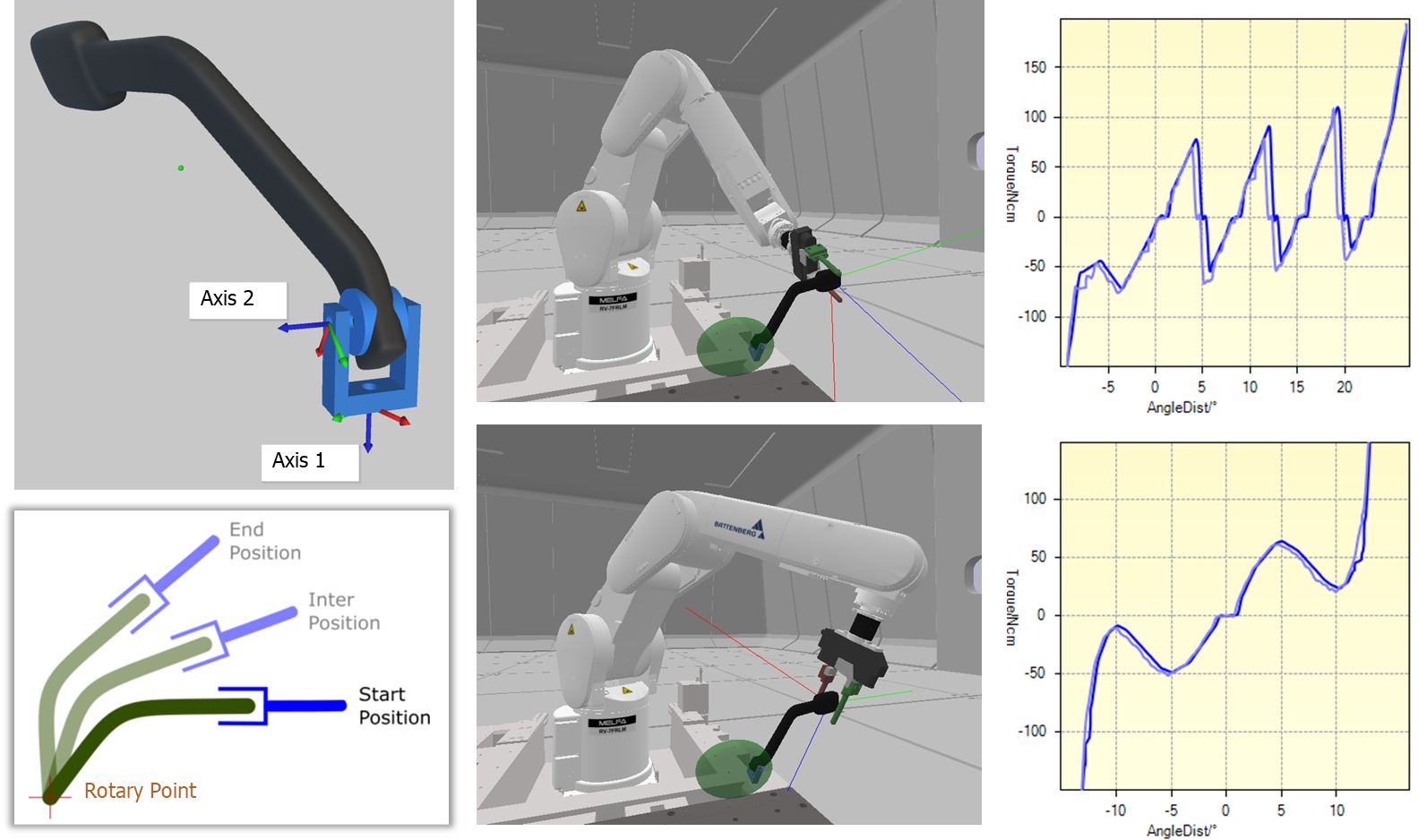
Ist der Roboterarm geeignet, die Kräfte und Drehmomente für das Öffnen und Schließen der Türen, Fenster und Hauben der Maschine aufzubringen und liegen die Gelenkströme des Roboterarms währenddessen innerhalb des Toleranzbereiches?
Diese Herausforderungen werden durch RobSimulation gelöst. Noch bevor die Prüfungen in der Realität ausgeführt wird, wird die Dimensionierung (Länge und Größe) und Position des Roboterarms in RobSimulation festgelegt. In der Simulation wird der gesamte Prüfablauf simuliert und die Ereichbarkeit der Prüfpositionen geprüft. Der virtuell optimierte Prüfablauf kann direkt zur virtuellen Inbetriebnahme in das reale System übertragenwerden.
Funktionelle Prüfungen in der Agrartechnik
AnmeldungDie Messrobotic, mit der Simulation RobSimulation erhält Einzug in die Agrartechnik.
Im Agrartechnik-Sektor generiert die Kombination aus hochpräziser Messtechnologie mit vorheriger Simulation des Prüfszenarios deutliche Zeit- und Kostenvorteile.
Bei der funktionellen Absicherung von Landmaschinen stellen die Größe und das Gewicht der Maschinen eine besondere Herausforderung dar. So stellen sich beispielsweise die Fragen:
Können alle Prüfpunkte durch den Roboter erreicht werden?
Ist der Roboterarm geeignet, die Kräfte und Drehmomente für das Öffnen und Schließen der Türen, Fenster und Hauben der Maschine aufzubringen und liegen die Gelenkströme des Roboterarms währenddessen innerhalb des Toleranzbereiches?
Diese Herausforderungen werden durch RobSimulation gelöst. Noch bevor die Prüfungen in der Realität ausgeführt wird, wird die Dimensionierung (Länge und Größe) und Position des Roboterarms in RobSimulation festgelegt. In der Simulation wird der gesamte Prüfablauf simuliert und die Ereichbarkeit der Prüfpositionen geprüft. Der virtuell optimierte Prüfablauf kann direkt zur virtuellen Inbetriebnahme in das reale System übertragenwerden.
Event Anmeldung
Wenden Sie sich gerne an uns zur Anmeldung zum Event. Nach Verifizierung Ihrer Kontaktdaten, senden wir Ihnen gerne weitere Informationen zur Anmeldung.

Weitere Neugkeiten

Entdecken sie unserer Neuerungen des Jahres 2025 und kostenlose Webinare!
Fallstudie: RobSimulation zur Roboterprogrammierung von Lenkstockschalter Messungen

Fallstudie: Virtuelle Inbetriebnahme bei komplexen Tür-Dauerlauf Tests
Virtuelle inbetriebnahm bei komplexen Tür-Dauerläufen in RobSimulation