Functional testing in agricultural engineering

Measuring robotics, with the simulation RobSimulation, is finding its way into agricultural engineering.
In the agricultural-sector, the combination of high-precision measurement technology with prior simulation of the test scenario generates significant time and cost benefits.
The size and weight of agricultural machinery pose a particular challenge when it comes to functional safety. For example, the following questions arise:
Can all test points be reached by the robot?
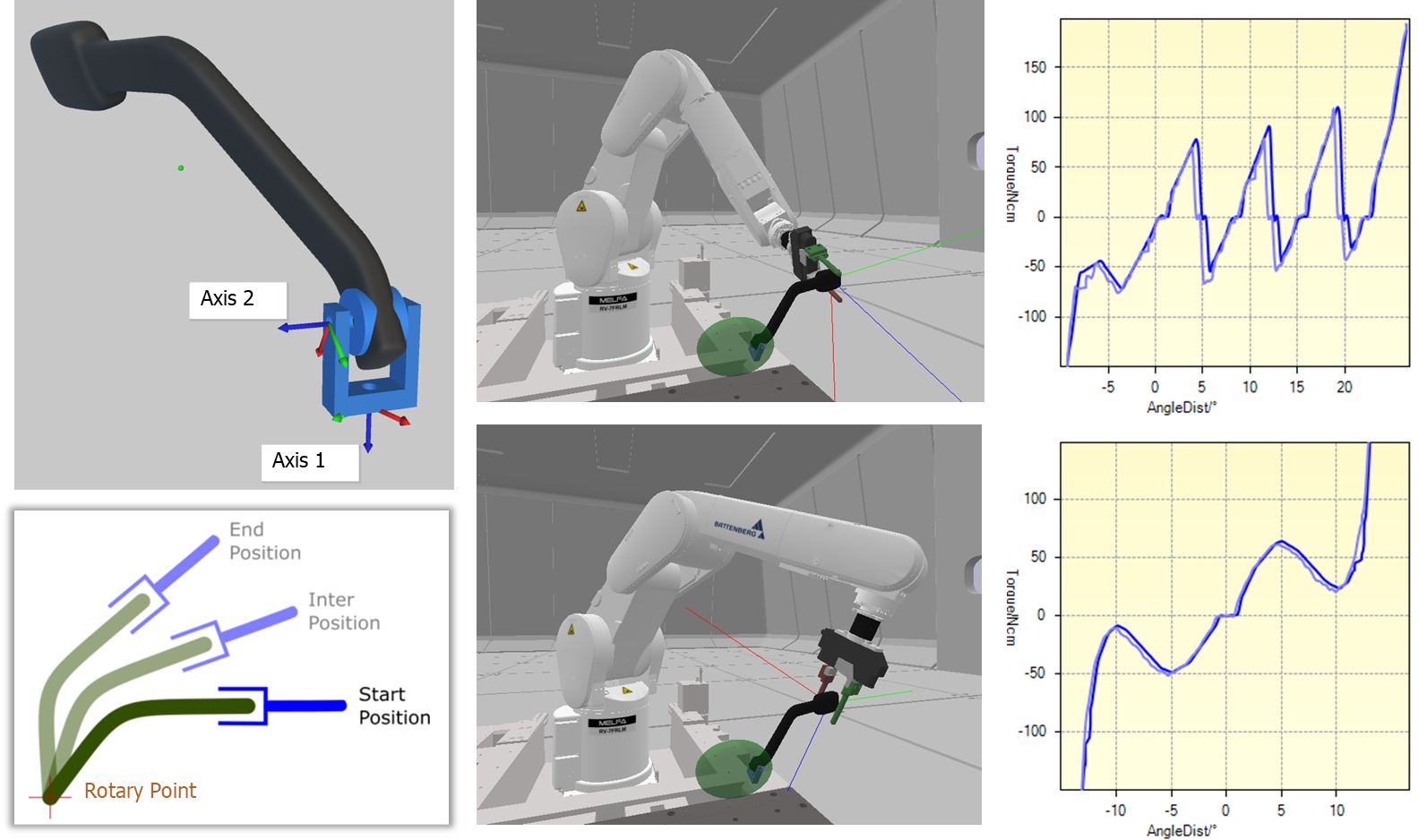
Is the robot arm suitable for applying the forces and torques for opening and closing the doors, windows and bonnets of the machine and are the jointcurrents of the robot arm within the tolerance range during this process?
These challenges are solved by RobSimulation. Even before the tests are carried out in reality, the dimensions (length and size) and position of the robot arm are determined in RobSimulation. In the simulation, the entire test sequence is simulated and the accessibility of the test positions is checked. The virtually optimised test sequence can be transferred directly to the real system for virtual commissioning.
Functional testing in agricultural engineering
signupMeasuring robotics, with the simulation RobSimulation, is finding its way into agricultural engineering.
In the agricultural-sector, the combination of high-precision measurement technology with prior simulation of the test scenario generates significant time and cost benefits.
The size and weight of agricultural machinery pose a particular challenge when it comes to functional safety. For example, the following questions arise:
Can all test points be reached by the robot?
Is the robot arm suitable for applying the forces and torques for opening and closing the doors, windows and bonnets of the machine and are the jointcurrents of the robot arm within the tolerance range during this process?
These challenges are solved by RobSimulation. Even before the tests are carried out in reality, the dimensions (length and size) and position of the robot arm are determined in RobSimulation. In the simulation, the entire test sequence is simulated and the accessibility of the test positions is checked. The virtually optimised test sequence can be transferred directly to the real system for virtual commissioning.
Event registration
Please feel free to contact us to register for the event. After verifying your contact details, we will be happy to send you further information on how to register.


.bmp)