Fallstudie: RobSimulation zur Roboterprogrammierung von Lenkstockschalter Messungen
Die offline Programmierung anhand der RobSimulation wird bereits erfolgreich und effizient beim Kunden eingesetzt. So konnte zum Beispiel ein Aufbau für die Prüfung der haptischen Qualität eines Lenkstockschalters realisiert werden.
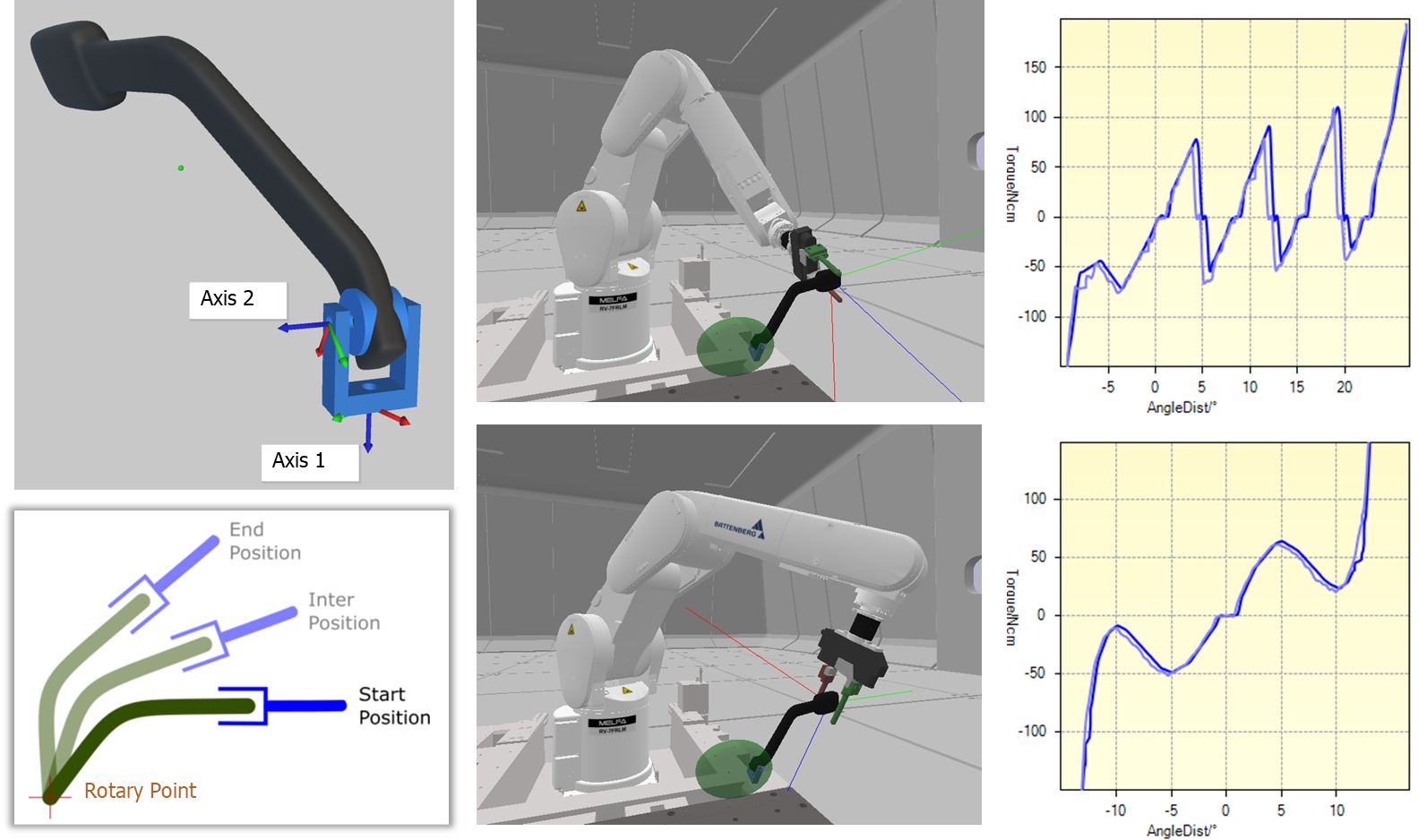
Die Messaufgabe besteht darin,einen Lenkstockschalter (z.B. Blinkerhebel) mit zwei Achsen zu betätigen und dabei die Haptik sowie die Funktion (CAN, LIN) zu prüfen. Für diese Rotationsbewegung um zwei Achsen ist ein Roboter mit 3D-Kraftsensor an der Hand nötig, der den Hebel an definierter Position greift und entlang der Kreisbahn um die verborgene Achse bewegt: Nur so können die reinen Bedienkräfte und-Momente erfasst werden, ohne Artefakte wie Kräfte durch Verkantung von Werkzeug und Hebel.
In RobSimulation können am CAD-Modell des Lenkstockschalters die Achsen bestimmt werden, um welche die Roboterhand mit Kraftsensor den Schalter bewegen muss, um ihn korrekt zu bestätigen. Auch die Orientierung des Betätigungswerkzeuges ist nicht beliebig, wenn Kräfte tangential zur Achsbewegung gemessen werden sollen: Auch diese Informationen können am CAD-Modell definiert werden. Zudem ist in RobSimulation für jede Achse ein Kraft- bzw. Momentenverlauf hinterlegt, sowie Achsgrenzen.
Der virtuelle Roboter betätigt den Lenkstockschalter in RobSimulation, wobei der Hebel folgt und virtuelle Kraft-Messwerte produziert, die vom virtuellen Kraftsensor aufgenommen werden. Die gesamte Roboterbewegung kann im Vorhinein betrachtet und auf Erreichkarkeit überprüft werden, bevor man zum realen Lenkstockschalter übergeht. Nach einem kurzen (haptischen) Einmessvorgang werden die Roboterbahnen aus RobSimulation auf den realen Roboter übertragen, der den Lenkstockschalter korrekt betätigt – wie in RobSimulation definiert.
So wird sichergestellt, dass sowohl die Bedienkräfte, -häufigkeiten und Prüfpositionen den Kundenspezifikationen entsprechen.
Anhand von CAD-Daten und den gewünschten Messpositionen konnte die Messzelle im Hause Battenberg virtuell aufgebaut und der Messablauf nach Kundenspezifikation erstellt werden. Im Anschluss konnte die Messaufgabe beim Kunden auf den realen Roboter übertragen und die Qualitätsprüfung direkt ausgeführt werden.
Die virtuelle Inbetriebnahme kann sowohl als Dienstleistung von Battenberg, als auch vollständig im Hause des Kunden durchgeführt werden.
Fallstudie: RobSimulation zur Roboterprogrammierung von Lenkstockschalter Messungen
AnmeldungDie offline Programmierung anhand der RobSimulation wird bereits erfolgreich und effizient beim Kunden eingesetzt. So konnte zum Beispiel ein Aufbau für die Prüfung der haptischen Qualität eines Lenkstockschalters realisiert werden.
Die Messaufgabe besteht darin,einen Lenkstockschalter (z.B. Blinkerhebel) mit zwei Achsen zu betätigen und dabei die Haptik sowie die Funktion (CAN, LIN) zu prüfen. Für diese Rotationsbewegung um zwei Achsen ist ein Roboter mit 3D-Kraftsensor an der Hand nötig, der den Hebel an definierter Position greift und entlang der Kreisbahn um die verborgene Achse bewegt: Nur so können die reinen Bedienkräfte und-Momente erfasst werden, ohne Artefakte wie Kräfte durch Verkantung von Werkzeug und Hebel.
In RobSimulation können am CAD-Modell des Lenkstockschalters die Achsen bestimmt werden, um welche die Roboterhand mit Kraftsensor den Schalter bewegen muss, um ihn korrekt zu bestätigen. Auch die Orientierung des Betätigungswerkzeuges ist nicht beliebig, wenn Kräfte tangential zur Achsbewegung gemessen werden sollen: Auch diese Informationen können am CAD-Modell definiert werden. Zudem ist in RobSimulation für jede Achse ein Kraft- bzw. Momentenverlauf hinterlegt, sowie Achsgrenzen.
Der virtuelle Roboter betätigt den Lenkstockschalter in RobSimulation, wobei der Hebel folgt und virtuelle Kraft-Messwerte produziert, die vom virtuellen Kraftsensor aufgenommen werden. Die gesamte Roboterbewegung kann im Vorhinein betrachtet und auf Erreichkarkeit überprüft werden, bevor man zum realen Lenkstockschalter übergeht. Nach einem kurzen (haptischen) Einmessvorgang werden die Roboterbahnen aus RobSimulation auf den realen Roboter übertragen, der den Lenkstockschalter korrekt betätigt – wie in RobSimulation definiert.
So wird sichergestellt, dass sowohl die Bedienkräfte, -häufigkeiten und Prüfpositionen den Kundenspezifikationen entsprechen.
Anhand von CAD-Daten und den gewünschten Messpositionen konnte die Messzelle im Hause Battenberg virtuell aufgebaut und der Messablauf nach Kundenspezifikation erstellt werden. Im Anschluss konnte die Messaufgabe beim Kunden auf den realen Roboter übertragen und die Qualitätsprüfung direkt ausgeführt werden.
Die virtuelle Inbetriebnahme kann sowohl als Dienstleistung von Battenberg, als auch vollständig im Hause des Kunden durchgeführt werden.
Event Anmeldung
Wenden Sie sich gerne an uns zur Anmeldung zum Event. Nach Verifizierung Ihrer Kontaktdaten, senden wir Ihnen gerne weitere Informationen zur Anmeldung.

Weitere Neugkeiten

Automatisierte Ultraschallprüfung mit unserer Battenberg MESSROBOTIC auf der AIRTEC 2025
Premiere auf der AIRTEC 2025: Battenberg MESSROBOTIC präsentierte die automatisierte Ultraschallprüfung für CFK-Bauteile – präzise, effizient und bis zu 40 % kostensparend

MAHINDRA & MAHINDRA Ldt. in Chennai Indien setzt in der Qualitätsprüfung auf die Messrobotic von Battenberg ROBOTIC
